-
AUTOSAR(AUTomotive Open System ARchitecture) 란 무엇인가?임베디드 및 관련 기술 2025. 1. 31. 19:39
AUTOSAR는 차량 SW 표준 플랫폼중 하나이다. 예를 들면 핸드폰의 IOS,Android나 PC의 Window,Linux 같은 역할이다.
즉, HW를 쉽게 쓰기 위해 나온 SW이다.
지금까지 조사, 공부한 사실을 쭉 정리해보기로 했다.
1.AUTOSAR 개요
- AUTOSAR 란?
AUTOSAR 는 자동차 산업의 표준화를 위해 만들어진 글로벌 개발 파트너쉽이다. 자동차 ECU(Electronic Control Unit, 자동차나 기타 탈것의 전기시스템을 제어하는 장치)의 개방형 표준 SW 구조를 개발하고 설립하는게 목적이다.
표준화 목표는 쉽게 말하면 크게 3가지이다. SW 개발 편의성, 재사용성, 모듈화이다.
비 AUTOSAR 개발방식과 비교하여 설명하면 다음 표와 같다.
구분 비 AUTOSAR AUTOSAR 기반 SW 개발 방식 각 회사마다 다른 구조 사용 표준화된 아키텍처 사용 코드 재사용성 다른 ECU에 적용하기 힘듬 SW 재사용 가능 모듈화 코드가 HW에 종속적 HW 독립적인 구조(MCAL 사용) 운영체제 회사별 RTOS 사용 OSEK 기반 AUTOSAR OS 사용 디버깅 회사별로 다름,비효율적 표준화된 환경으로 유지보수 용이 SW 개발 편의성은 이렇게 각 회사마다 다른 구조를 사용하여 SW를 개발하기 어려워져서 SW의 구조를 표준화 한것을 말한다. 각각이 자신만의 방법을 지키는것보다 모두가 정한 규칙과 표준을 지키는게 개발이 더욱 쉬워지니깐 말이다.
SW 재사용성은 HW의 독립적인 SW 컴포넌트(SW-C, SW를 모듈화한 단위. 다른 컴포넌트와 연결하여 동작) 구조로 다른 ECU에서도 코드를 사용할수있도록 표준화 한것이다.
그렇다면 원하는 기능의 코드를 다시 만드는것이 아니라 재사용하여 개발 과정의 비용과 시간을 줄이고, SW의 품질을 향상시킬 수 있다.
SW 모듈화는 저마다 다른 자동차에 SW를 필요에 따라 적용할 수 있게 하는 것이다. 기능별 독립적인 SW 컴포넌트로 구성되어 있어 기능 추가가 쉽다. 마치 테트리스의 원하는 모양을 찾아 추가만 하면되듯이 말이다.
즉, 자동차 SW 산업 개발자의 코드 유지보수와 효율성, 신뢰성을 높이기 위해 개발된 플랫폼이라고 알수있다.다음은 AUTOSAR 플랫폼 종류에 대해 비교해보자.
- AUTOSAR Classic, Adaptive
Classic, Adaptive은 모두 AUTOSAR 표준의 일부지만 각각 목적과 설계에 있어 차이가 있다.
Classic은 ECU 중심, Adaptive는 ADAS, 고성능 SW 중심이다. 그래서 Classic은 높은 신뢰성과 매우 빡빡한 RTOS를 제공하는게 중심이고, Adaptive는 고성능 계산과 다양한 OS에서의 작동이 중심이다. 이것도 비교표를 보면서 설명하면 쉽다.
구분 AUTOSAR Classic AUTOSAR Adaptive 사용 목적 ECU 제어(실시간 임베디드 시스템) ADAS,IVI 등 고성능 SW 프로세서 마이크로 컨트롤러(MCU) 고성능 마이크로프로세서(MPU,SoC) 프로그래밍 언어 C 기반 C++ 기반 실시간 성능 Hard Real-Time Soft Real-Time OS RTOS 기반 OS POSIX 기반 OS 사용 예 ECU 제어, 센서 등 필수적인 차량 제어 기능 ADAS,자율주행,IVI 등 복잡하고 동적인 기능 즉, Classic은 단순하고 전통적인 자동차 기능의 구현이 목적이라면, Adaptive는 최신 기술에 대응하여 만들어진 플랫폼이라고 할수있다.
2.AUTOSAR Layer 구조 정리
- Classic AUTOSAR
Classic은 Layered Architecture(계층형 아키텍처, SW의 각기능을 논리적인 계층으로 나누어 설계하는 방식)으로 이루어져있다.
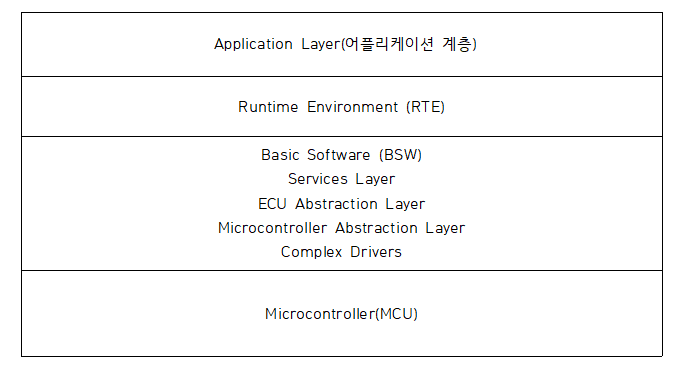
AUTOSAR Classic 구조 각 구조는 다음과 같다.
1. Application Layer (애플리케이션 계층)
- ASW(Application Software,SW-C의 집합)로 구성되어있고, 차량의 ECU의 특정 기능 구현을 담당한다.
- 서로 다른 SW-C간 통신을 위해 RTE를 통해 메시지를 송수신한다.
- 기능에 따라 Actuator,Sensor등으로 나뉜다.
2. Runtime Environment (RTE)
- SW-C 간 데이터 송수신을 담당하는 미들웨어(Application과 OS간의 중간 계층에서 동작하는 SW)
- Sender-Receiver(데이터를 송신하고 수신하는 단방향 데이터 전송,P-port,R-port로 송수신 역할이 정해져있다.), Client-Server(요청하고 응답하는 양방향 통신,R-port,P-port로 요청과 제공 역할 나눠져있다) 통신방식 사용
- CAN(Controller Area Network,실시간 제어 시스템에 사용되는 높은 신뢰성의 통신방법),LIN( Local Interconnect Network ,저속 통신이 필요한 시스템에서 사용되는 통신 방법) 등과 연결
3. Basic Software (BSW)
- ECU가 실행되기 위한 기본 SW 기능 제공
- Services Layer : OS 관리(Task 스케줄링, 인터럽트 관리등),진단 및 오류 관리(DEM을 통해 ECU 상태 오류를 기록),통신 관리(CAN,LIN,Ethernet등 다양한 프로토콜 지원)
- ECU Abstraction Layer(EAL) : HW 독립적 API 제공(상위 레이어가 HW 세부 사항을 알지 않고도 장치 제어 하도록함),장치 드라이버 통합,통신 인터페이스(CAN,LIN 등의 추상화된 인터페이스 제공)
- Microcontroller Abstraction Layer (MCAL) : 마이크로컨트롤러 제어(GPIO,Timer,PWM등 주변 장치를 제어),HW 초기화(마이크로컨트롤러 및 주변 장치 초기화),인터럽트 관리(필요한 데이터를 상위 레이어로 전달)
4. Complex Drivers
- AUTOSAR 표준에 포함되지 않은 특수한 HW 제어를 위해 사용하는 레이어 -> HW 제어 로직을 별도로 처리
- Adaptive AUTOSAR
Adaptive는 고성능 컴퓨팅과 동적 Application을 지원하기위한 서비스 지향 아키텍처(SOA)이다.
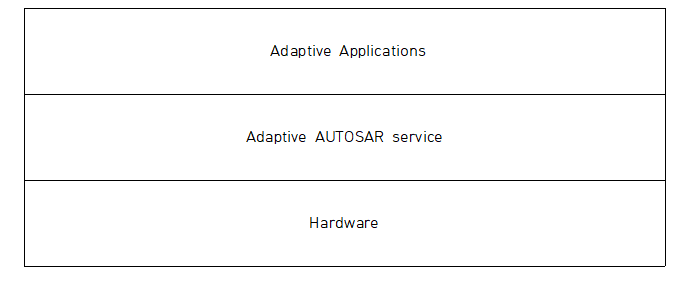
AUTOSAR Adaptive 구조 각 구조는 다음과 같다.
1.Adaptive Applications(애플리케이션 계층)
- 자율주행,IVI,OTA 업데이트 기능 포함
- Classic 처럼 정적인 SW가 아니라, 동적으로 실행 가능
- ARA(AUTOSAR Runtime for Adaptive Application) 사용하여 동적 서비스 관리 지원
2. Adaptive AUTOSAR service
- SOME/IP를 사용하는 통신(Classic과 다르게 CAN,LIN 말고 Ethernet 기반 고속 데이터 송수신)
- 실행 중 새로운 애플리케이션 실행 가능
3.Hardware
- Classic과 다르게 MPU기반의 고성능 HW를 사용하여 여러 기능 및 더욱 빠른 속도 제공
2.AUTOSAR 통신 프로토콜
AUTOSAR에는 다양한 통신 프로토콜이 있다. ECU는 단독으로 동작하지않고 서로 데이터를 교환하기때문이다.
특히 Sensor, Actuator,등 다양한 장치간 통신이 필요하기에 또한 안정성과 실시간성을 고려해야 하기때문에 다양한 프로토콜을 지원한다.
- CAN(Controller Area Network)
특징: 저속~ 중속 데이터 전송, ECU 간 안정적인 통신
속도: 최대 1 Mbps
설명: 차량 내에서 호스트 컴퓨터 없이 마이크로컨트롤러나 장치들이 서로 통신하기 위해 설계된 표준 통신 규격
차량내 ECU들은 CAN 프로토콜을 사용하여 통신한다. 버스(bus)기반 통신 방식으로 여러 ECU가 한 개의 CAN 버스를 공유함, 비용이 낮고 신뢰성이 높음
- LIN(Local Interconnect Network)
특징:저속, 단순한 마스터-슬레이브 구조
속도: 최대 20 kbps
설명: 저속,저전력,단순한 네트워크를 가진 통신 방법으로 차량에 사용되는 전장품중에 안전과 무관한, 속도가 늦어도 상관없는 전장품에 많이 사용된다. 하지만 CAN과 직접 호환되지 않는다.
- FlexRay
특징:고속, 실시간 데이터 전송 지원
속도:최대 10 Mbps
설명:CAN보다 속도가 빠르고 안전성 높음, 이중화 채널을 제공하여 고장 발생시 백업 경로 사용가능
- Ethernet (SOME/IP)
특징:고속 데이터 전송 가능,SOME/IP 방식 사용
속도:100 Mbps ~ 1Gbps
설명: Adaptive AUTOSAR는 Ethernet 기반 통신을 중심으로 설계한다. IVI, ADAS, 차량 클라우드 연결에 쓰인다
'임베디드 및 관련 기술' 카테고리의 다른 글
Verification(검증), Validation(확인) (0) 2025.08.24 A-SPICE 와 ISO 26262 (2) 2025.08.17 모터의 종류(DC,BLDC,PMSM) (5) 2025.08.10 마이크로프로세서(MPU)와 마이크로컨트롤러(MCU) (7) 2024.10.17 임베디드 시스템의 기본과 특징 (5) 2024.10.08